Veo que aún hay cierta confusión con este tema.
A ver si puedo aclararlo. Voy a centrarme en las DK2.
FUNCIONAMIENTO
Utiliza una combinación de giroscopios de 3 ejes, acelerómetros y magnetómetros, que lo hacen capaz rastrear el movimiento y posición en relación a la tierra.
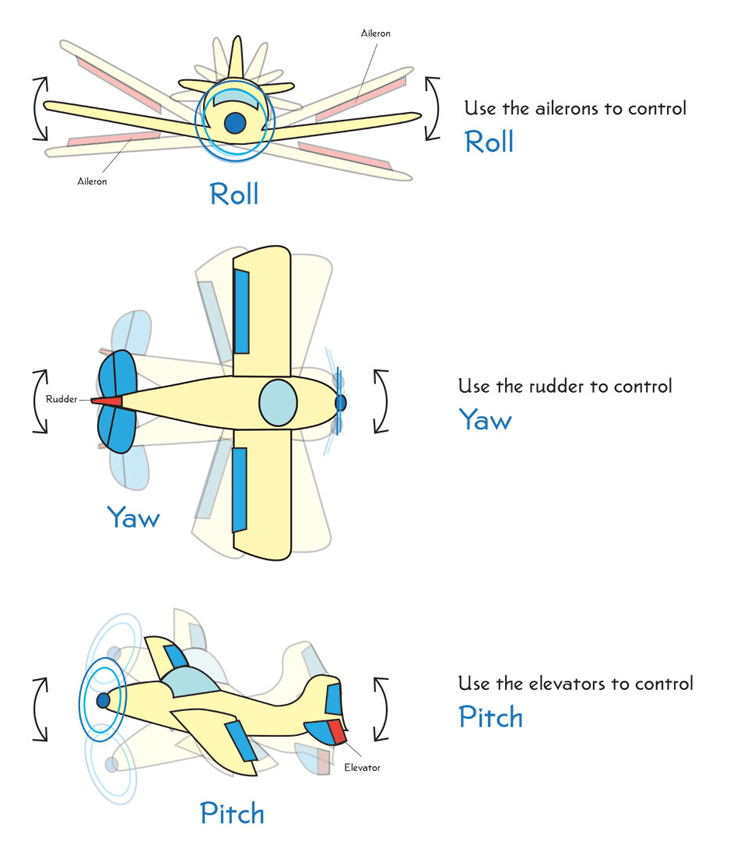
Vamos a centrarnos en los giroscopios (sensores x y z).
Imaginad que la tablet es vuestra cabeza. Detecta esos movimientos.
Hagas lo que hagas con las hmd, los sensores van a dar unos valores determinados, con lo que si estamos en un cockpit y silla estática, no pasa nada porque lo que hagamos con la cabeza se verá reproducido en la imagen del ordenador.
El problema viene al usar un sistema de movimiento (de plataforma o de asiento)
SISTEMA DE PLATAFORMA
SISTEMA DE MOVIMIENTO DE ASIENTO
Al usar cualquiera de estos 2 sistemas, cuando te inclina de un lado a otro (adelante, atrás, izq y dcha), los sensores de las hmd siguen funcionando con lo que la imagen en el juego se malinterpreta y sería como si agacharas, levantaras o giraras la cabeza de una manera muy pronunciada. (Cosa que en la vida real NO PASA de esta manera. Quizás algo se mueva la cabeza al frenar dependiendo de las fuerzas G y tipo de persona, pero nunca al frenar en un coche real de competición vas a quedar mirando al suelo, para que se me entienda)
¿SOLUCION?
1) Desactivando el posicionamiento (los sensores) del casco. ERROR, pues la imagen siempre está en linea recta y no cambia ni al girar la cabeza a ningún lado.
2) Pasa por modificar los valores de posición del SDK para decirle al juego que no mueva la imagen cuando tú sigues mirando al frente pero la estructura o asiento está inclinado.
¿Cómo? Instalando sensores también en el asiento o estructura y modificando a tiempo real la posición del SDK de oculus.
Que es justo lo que han hecho los de este proyecto.
www.vectionvr.com/en/index.html
------
gallox » 24 Ago 2015 - 02:57
No me lo creo, escribí un post largo y no se a que le di (creo que al tabulador) y perdí el post. 
En fin.. lo perdido perdido esta. En resumidas cuentas, esos no son simuladores de automoción y no son realistas en forma o movimiento, la consecuencia esta en que el visor recoge movimientos que no existen en la realidad.
También hay que decir que la gran culpa (en realidad toda) de esos movimientos completamente fuera de lugar lo tiene la manía de intentar recrear fuerzas G mediante ejes de inclinación, cosa que no es posible dado que los G son por la inercia y no por la inclinación, mucho menos por ángulos tan agresivos como los que se ve en esos "simuladores". No me extraña que no sean cómodos de usar con un visor de RV, si son prácticamente montañas rusas.
A día de hoy los sistemas de movimiento de conducción ASEQUIBLES están hechos de esta manera, con inclinación. Es cierto que sería más indicado para simuladores de vuelo que rotan y se inclinan, pero si hubiera que hacer un sistema que emulara las inercias, necesitarías una nave industrial con raíles en el suelo para provocar esa sensación. Al final, serían millones de euros de gasto. Sería más fácil y económico comprarse un coche de competición real y competir por todo el mundo.
Como es lo que hay ahora mismo, tenemos que intentar adaptar las oculus (o similares ) a ese tipo de sistemas. Y estoy seguro que lo conseguiré (conseguiremos) y podremos engañar a la mente cuando frenemos y la imagen del juego no cambie pero nuestro cuerpo se quede presionado con los arneses del asiento, como ocurre en la realidad.
----
Sechi » 24 Ago 2015 - 09:32
Pero si enganchas la cámara del dk2 al volante no reconoceria solamente los movimientos de la cabeza y los del asiento no ?
No.
La cámara de la DK2 sólo detecta la posición de profundidad respecto de tu casco. Si te acercas, lo detecta y te acerca la imagen en el juego. Si te alejas lo mismo. Pero los giroscopios y sensores los lleva el casco, que son los culpables de reproducir esas inclinaciones dentro del juego.